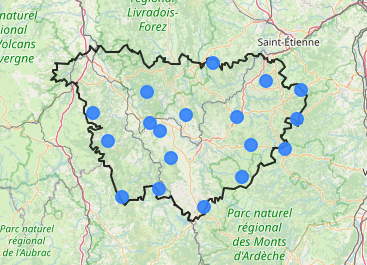
Carte : points de mesure
Les marqueurs représentent les webcams. Un événement apparaît lorsqu’un passage de véhicule est détecté (filtré pour limiter le bruit et les doublons).
Dernière détection, compteurs “du jour”, et visualisations (carte + histogramme).

Référence & remerciements
Une seule image peut devenir une donnée : “quand / où / combien”.
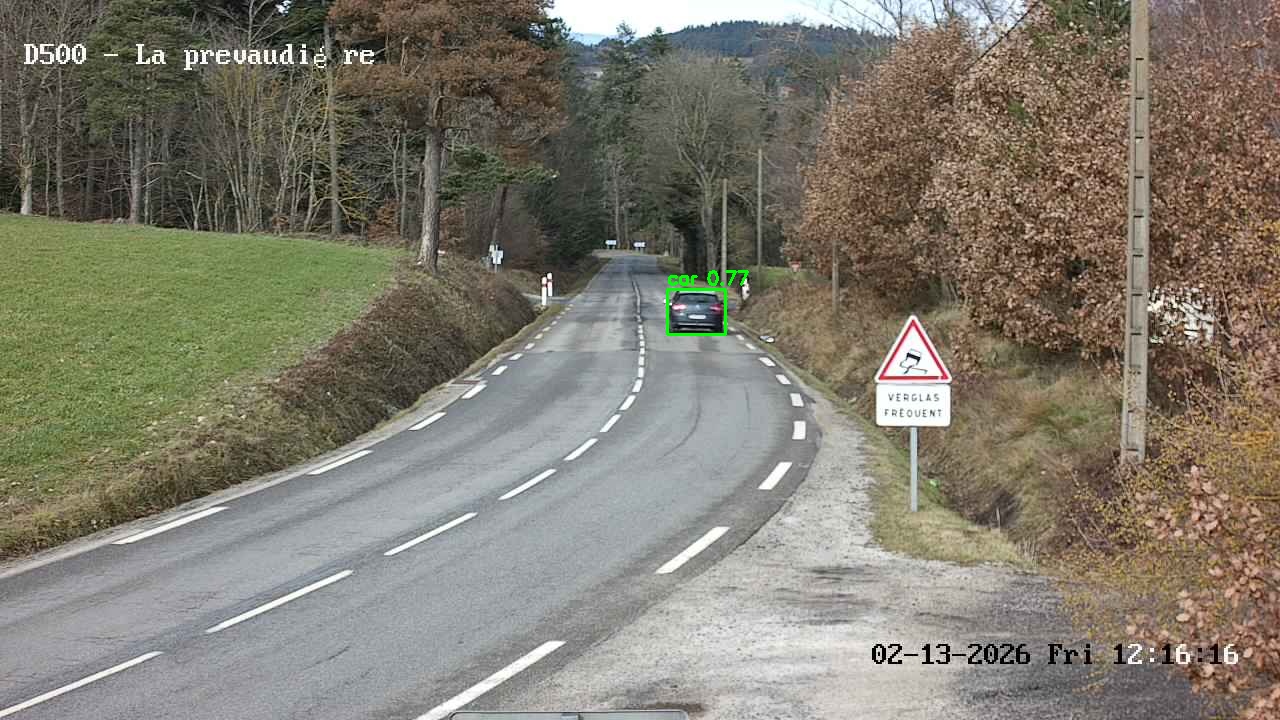
Snapshot
Détection YOLO (vehicle)
Carte des détections + histogramme horaire : la vision sert la donnée.
Les marqueurs représentent les webcams. Un événement apparaît lorsqu’un passage de véhicule est détecté (filtré pour limiter le bruit et les doublons).
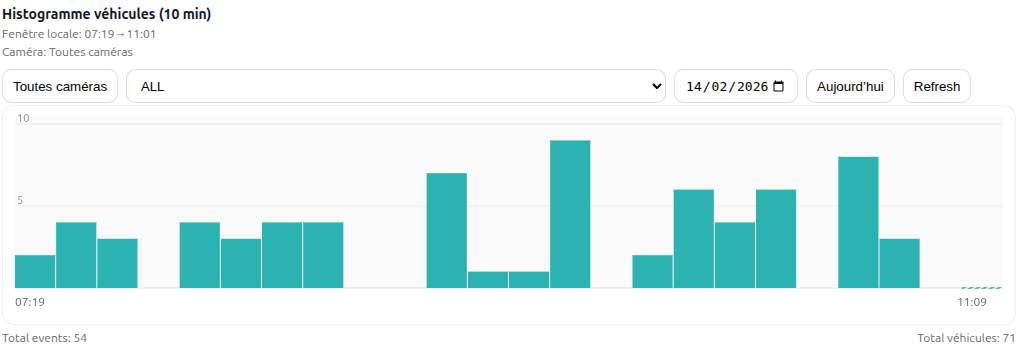
Les événements sont agrégés par créneau pour visualiser les pics et les périodes calmes, et comparer l’activité d’une journée à l’autre.
Principe de minimisation : l’image sert à détecter, puis elle est dégradée pour l’affichage (redimensionnement + léger flou). L’objectif est statistique, pas l’identification.
CPU-first, exécution uniquement si l’image a changé (hash), et pause automatique la nuit. Moins de charge, plus de stabilité.
Python, SQLite, services systemd, reverse proxy (YunoHost). Architecture simple, lisible et maintenable.